-
Email info@ijcmcs.org
-
Address 848 N. Rainbow Blvd. #5486 Las Vegas, NV 89107, USA
Chemical Engineering Department, University of Puerto Rico, Mayaguez, PR, USA.
*Corresponding author: Lakshmi N Sridhar
Chemical Engineering Department, University of Puerto Rico, Mayaguez, PR, USA.
Received: Oct 21, 2024
Accepted: Dec 22, 2024
Published Online: Dec 29, 2024
Journal: International Journal of Clinical & Medical Case Studies
Copyright: © Sridhar LN (2024). This Article is distributed under the terms of Creative Commons Attribution 4.0 International License
Citation: Sridhar LN. Bifurcation analysis and multiobjective nonlinear model predictive control of drug addiction models. Int J Clin Med Case Stud. 2024; 1(1): 1002.
Bifurcation analysis and nonlinear model predictive control were performed on drug addiction models. Rigorous proof showing the existence of bifurcation (branch) points is presented along with computational validation. It is also demonstrated (both numerically and analytically) that the presence of the branch points was instrumental in obtaining the Utopia solution when the multiobjective nonlinear model prediction calculations were performed. Bifurcation analysis was performed using the MATLAB software MATCONT while the multi-objective nonlinear model predictive control was performed by using the optimization language PYOMO.
Mental health has become a significant focus for researchers and medical doctors in the last decade. Ironically, drug addiction is both cause and effect for the existence of mental health problems. People with mental health issues resort to drugs and drugs in turn lead to mental health problems. Additionally, drug addiction has led to a considerable amount of poverty and crime. It is therefore important to develop strategies to curb drug addiction. The problem of drug addiction has led to computational research to develop reliable techniques to be able to control drug addiction. This work aims to perform bifurcation analysis in conjunction with Multiobjective Nonlinear Model Predictive Control (MNLMPC) calculations on models involving drug addiction. This paper is organized as follows. First, the background section with the literature review is presented. The bifurcation analysis techniques and the multiobjective nonlinear model predictive control strategies are presented followed by a description of how the presence of singular points affects the MNLMPC calculations. Two drug addiction example problems where MNLMPC calculations are performed in conjunction with bifurcation analysis are presented. It is numerically demonstrated that the presence of bifurcation points in the drug addiction models enables the MNLMPC calculations to converge to the Utopia solution.
Background
Studied [1] the dynamics of tobacco addiction models. Performed [2-4] dynamic and optimal control studies of drug addiction models. Investigated [5] the effect of having drug rehabilitation centers to combat drug addiction. Developed [6,7] a mathematical analysis of some dynamic Models of drug addiction, while [8] studied the dynamics of drug resistance. Modeled [9,10] the dynamics of crystal meth abuse and heroin epidemics. Examined [11] the effect of recycling the recovered individuals back into the population while [12] studied the effect of drugs on global health. Studied [13] the effect of cannabis on mental health [14] investigated the use of strategies to, monitor alcohol and substance abuse. Studied [15-17] dynamic models involving illicit drug use. All the optimal control work done so far involves single objective minimization. In this work multiobjective nonlinear model predictive control calculations are performed on drug addiction models in conjunction with bifurcation analysis. It is numerically demonstrated for two probels involving drug addiction that the presence of bifurcation points enables the MNLMPC calculations to converge to the Utopia solution. The bifurcation analysis and the MNLPMC methods will now be presented followed by an explanation as to why the presence of bifurcation points leads to the MNLMPC calculations converging to the Utopia solution.
Bifurcation analysis
The existence of multiple steady-states (caused by limit and branch point singularities) and oscillatory behavior caused by Hopf bifurcation points) in chemical processes has led to a lot of computational work to explain the causes of these nonlinear phenomena. N MATCONT, [18,19] is a commonly used software to find limit points, branch points, and Hopf bifurcation points. Consider an ODE system.

 The tangent plane at any point x is [v1, v2, v3, v4, ....vn+1]. Define matrix A given by
The tangent plane at any point x is [v1, v2, v3, v4, ....vn+1]. Define matrix A given by
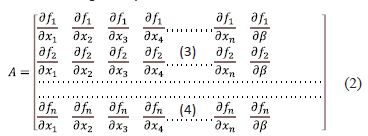
With β the bifurcation parameter. The matrix A can be written in a compact form as

The tangent surface must satisfy
Av = 0
For both limit and branch points the matrix B must be singu-
lar. For a limit point (LP) the n+1th component of the tangent vector Vn+1 = 0 and for a branch point (BP) the matrix  must be singular., The function
must be singular., The function  should be zero for a Hopf bifurcation point.
should be zero for a Hopf bifurcation point. indicates the bialternate product while In is the n-square identity matrix. A detailed derivation can be found in [20,21] and [22]. Used Matcont to [23] perform bifurcation analysis on chemical engineering problems.
indicates the bialternate product while In is the n-square identity matrix. A detailed derivation can be found in [20,21] and [22]. Used Matcont to [23] perform bifurcation analysis on chemical engineering problems.
MNLMPC (Multiobjective Nonlinear Model prediotive control) method
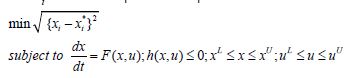
The multiobjective nonlinear model predictive control (MNLMPC) method was first proposed by [24] and used by [25]. This method is rigorous and it does not involve the use of weighting functions not does it impose additional parameters or additional constraints on the problem unlike the weighted function or the epsilon correction method [26]. For a problem that is posed as

The MNLMPC method first solves dynamic optimization problems independently minimizing/maximizing each Xi individually. The minimization/maximization of Xi will lead to the values Xi*. Then the optimization problem that will be solved is
This will provide the control values for various times. The first obtained control value is implemented and the remaining discarded. This procedure is repeated until the implemented and the first obtained control value are the same.
The optimization package in Python, Pyomo [27] where the differential equations are automatically converted to a Nonlinear Program (NLP) using the orthogonal collocation method [28] is commonly used for these calculations. The state of the art solvers like IPOPT [29] and BARON [30] are normally used in conjunction with PYOMO.
Effect of singularities (Limit Point (LP) and Branch Point (BP)) on MNLMPC
Let the minimization be of the variables l result in the values M1 and M2 . This The multiobjective objective function to be minimized will be
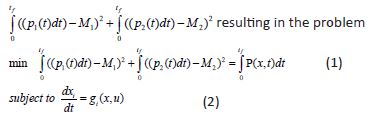
The Euler Lagrange equation (also known as costate equations will be

λi is the lagrangian multiplier. Taking the derivative of the objective function we get

At the Utopia point both (p1 − M1) and (p2 − M2) are zero. Hence

The co-state equation in optimal control is

λi is the lagrangian multiplier. The first term in this equation is 0 and hence
If the set of ODE  has a limit or a branch point, xg is singular.
has a limit or a branch point, xg is singular.
This implies that there are two different vectors-values for [λi] where  In between there is a vector [λi] where
In between there is a vector [λi] where  This coupled with the boundary condition λi(tf)=0 will lead to [λi]= 0 which will make the problem an unconstrained optimization problem. The only solution for the unconstrained problem is the Utopia solution.
This coupled with the boundary condition λi(tf)=0 will lead to [λi]= 0 which will make the problem an unconstrained optimization problem. The only solution for the unconstrained problem is the Utopia solution.
In this section, the results of bifurcation analysis and MNLMPC calculations for two problems involving drug addiction are presented. The models used are described in Islam et al (2020) and Mushayabasa et al (2015b). The equations for each problem are presented followed by the bifurcation analysis and MNLMPC results.
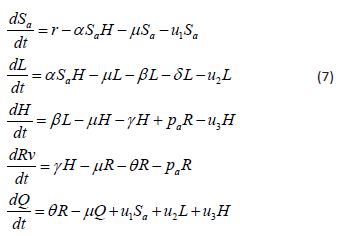
Problem 1: Islam et al (2020 Equations representing Problem 1)
• Sa(t) represents individuals who are not drug users, but at a high risk of taking drugs
• L(t) represents light drug users
• H(t) represents heavy drug users
• Rv(t) represents drug users under treatment in rehabilitation
• Q(t) represents individuals who will never take drugs
The equations are
The model parameters are

Where
• r represents the recruitment rate of the population
• μ is the natural mortality rate
• α is the interaction rate among the susceptible and light drug users
• β is the effective rate at which light users convert into heavy drug users
• δ the removal rate from addiction without treatment
• γ is the rate at which heavy addicts are being sent to rehabilitation for treatment
• u1 is the awareness and educational programs
• u2 is the family based care
• u3 represents the effectiveness of rehabilitation centers
Bifurcation analysis for problem 1
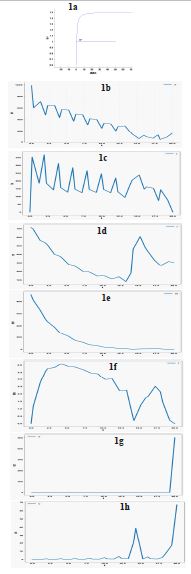
When bifurcation analysis with being the bifurcation parameter was performed on the equations representing problem 1, a branch point was found at [Sa, L, H, Rv, Q, μ] values of (782.26, 0.0, 0, 0,0, 0.005433 ). Fig. 1a shows the bifurcation diagram with this branch point.
MLNMPC for problem 1
For the MNLMPC of problem 1, ΣQ(t) was maximized and resulted in a value of 2000; while ΣH(t) was minimized and resulted in a value of 0. The multiobjective optimal control problem involved the minimization of (ΣQ(t)-2000)2+(Σ H(t)-0)2−− subject to the dynamic equation set representing this problem . This resulted in the Utopia point of 0 and the MNLMPC values of the the control variables obtained were [u1, u2, u3] = [0.0004, 0.0405, 0.5362]. The MNLMPC profiles are shown in figures 1a-1i.
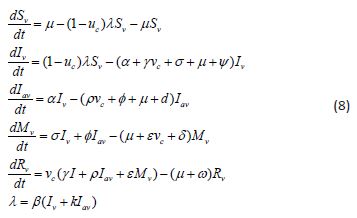
Problem 2 Mushayabasa et al (2015b)
Equations representing Problem 2
In this problem, the time-dependent variables are
• Sv (t) susceptible individuals
• I (t) light or occasional drug users
• Iav (t) heavy drug users
• Mv (t) mentally ill population and (individuals who suffer mental illness due to drug use,
• Rv (t) detected illicit drug users
The equations that represent the drug addiction problem are
and the parameter values are
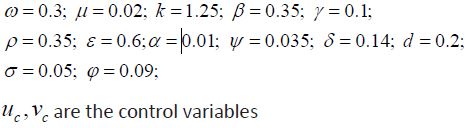
Here,
• α represents the rate at which light drug users become heavy drug users
• γ, ε, ρ the rates of detection and rehabilitation of individuals in classes Iv, Mv, Iav
• σ, φ the rates at which light and heavy illicit drug users develop mental illness
• d, ψ the permanent exit rates of light and heavy users
• δ mentally ill individuals who permanently exit the model because of death
• ω the rate at which individuals recover as a result of rehabilitation
• β the strength of interactions between susceptible individuals and illicit drug users
• uc represents the reduction of the intensity of “social influence”
• vc models the effort on the detection of illicit drug users
Bifurcation analysis for Problem 2
When bifurcation analysis with α as the bifurcation parameter was performed on the equations representing problem 2, a branch point was found at[Sv, II, Iav, MM, Rv, α] = [ 1.0, 0.0, 0.0, 0.0, 0.0, 0.430112]. The bifurcation diagram is shown in Figure 2a.
MLNMPC for problem 2
For the MNLMPC of problem 2, Σ Iv(t) and Σ Iav(t) were minimized individually and both the minimizations resulted in a value of 0. The multiobjective optimal control problem involved the minimization of (Σ Iv(t))2+(Σ Iav(t))2 subject to the dynamic equation set representing this problem. This resulted in the Utopia point of 0 and hte MNLMPC values of the the control variables obtained were [u1, u2, u3] =[0.0004, 0.0405, 0.5362]. The various MNLMPC profiles are shown in Figures 2b-2h.
Two problems involving drug addiction models have been shown to exhibit branch points leading to two different solution branches. In both cases, it is computationally shown that the MNLMPC calculations would converge to the Utopia solution as the theoretical analysis predicts.

Branch points leading to two separate branches were exhibited when bifurcation analysis was performed on the two drug addiction models considered in this paper. Rigorous analysis demonstrated that the presence of the branch points would result in the MNLMPC calculations. This fact was also computationally validated. Future work would involve using drug addiction models with time delay.
Data availability statement: All data used is presented in the paper.
Conflict of interest: The author, Dr. Lakshmi N Sridhar has no conflict of interest.